Uday Sankar
I'm a Robotics Engineer
About
Computer Vision & Robotics Engineer.
Passionate about computer vision, robotics, and deep learning, and I am actively seeking opportunities to apply these skills across diverse domains.
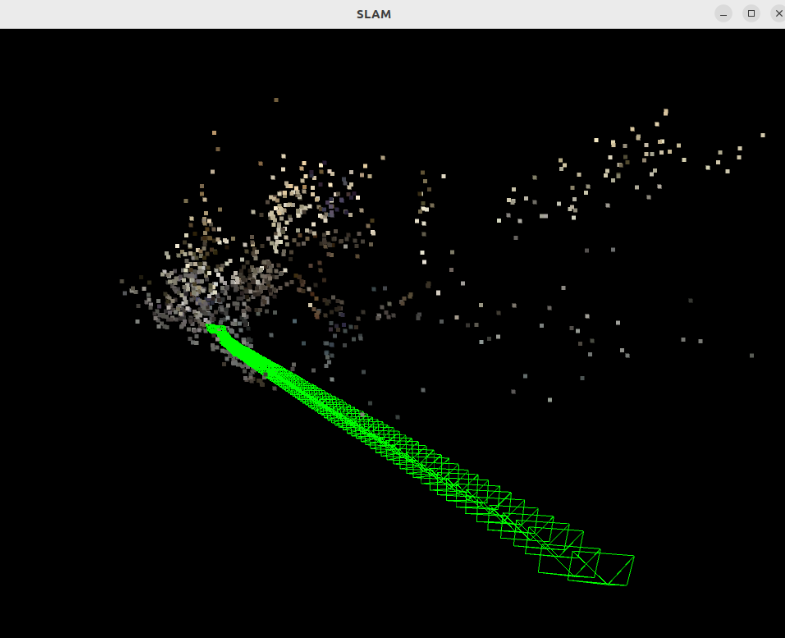
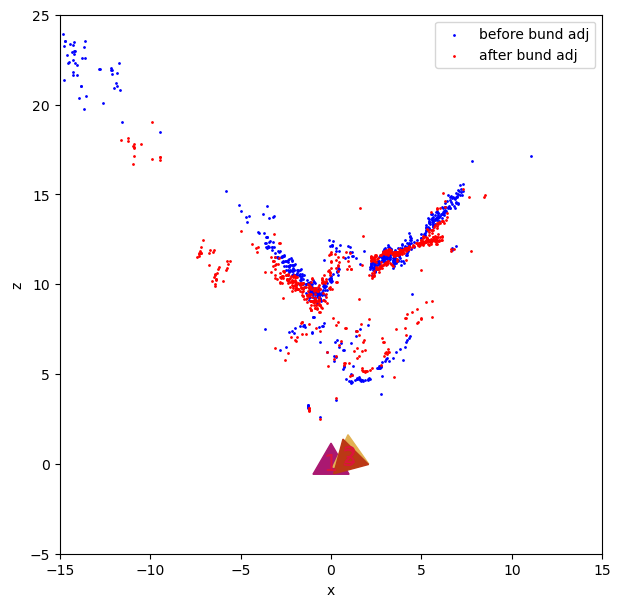
My name is Uday Sankar, and I earned my Master's degree in Robotics Engineering from Worcester Polytechnic Institute in May 2024. I have a strong interest in 3D Computer Vision, particularly in 3D reconstruction and Simultaneous Localization and Mapping (SLAM).
Years of Experience
+ Projects
Positions held
Skills
Programming Languages
- C++
- Python
- MATLAB
- Bash
Technologies & Tools
- CMake
- ROS/ROS2
- Isaac Sim
- Gazebo
- Docker
- Git
- Blender
Frameworks
- PyTorch
- TensorFlow
- Keras
- OpenCV
- Pandas
- Point Cloud Library
- OpenGL
- g2o
- GTSAM
Deep Learning Architectures
- CNN
- RNN
- Autoencoder
- VGG16
- ResNet
- DenseNet
- NeRF
- Transformers
- LSTM
- GAN
Resume
I am actively searching for full-time opportunities in Computer Vision and Robotics. The PDF version of my resume can be found here.
Summary
Uday Sankar
- Worcester, MA
- (774) 519-8248
- usankar@wpi.edu
Education
MS in Robotics Engineering
Aug 2022 - May 2024
Worcester Polytechnic Institute, Worcester, MA
Relevant Coursework:
- Computer Vision
- Deep Learning
- Machine Learning
- Motion Planning
- Robot Control
BTech in Electrical and Electronics Engineering
Aug 2018 - May 2022
Cochin University of Science and Technology, India
Relevant Coursework:
- Industrial Automation
Professional Experience
Robotic Perception Intern
Aug 2024 - Present
Onki Robotics, New York, NY
- Compiling a series of CV modes, like Depth Anything, YOLO, DeepSort, etc. for the Jetson Orin Platform
- Utilizing TensorRT and other techniques to enhance model performance and increase inference speed
- Improved frame rate from less than 1FPS to about 6FPS, with ongoing efforts to further enhance model efficiency
Computer Vision Algorithm Intern
Feb 2024 - April 2024
UVeye, Boston, MA
- End-to-end computer vision project to detect wheel misalignment for an automatic vehicle inspection system
- Measures the toe angle by detecting vehicle rims by fine-tuning Segment Anything Model
- Curated datasets using CVAT and ClearML, to fine tune SAM
Graduate Student Researcher
Aug 2023 - Dec 2023
Worcester Polytechnic Institute, Worcester, MA
- Simulated Franka Emika robot in NVIDIA Isaac Sim
- A state machine based system using both ROS2 and Isaac Sim API to control the robot
- LLMs for breaking down complex robotic tasks into a sequence of simpler, more manageable actions
Robotics Intern
Jun 2023 - Aug 2023
Orangewood Labs, San Francisco, CA
- RoboGPT, an LLM based interface for a 6DoF Robotic Arm
- Perception stacks for the robot using YOLO, CLIP, and multimodal InstructBLIP model
- Multi-camera system using Realsense D435 and D405 RGB-D cameras at workspace and end-effector
Portfolio
- All
- Computer Vision
- Deep Learning
- Robotics